TOOLS AND APPLICATION DEVELOPMENT
WINSAI has a team of experts in Robot Operating System (ROS) which comprises a set of software libraries and tools that help us build robot applications state-of-the-art algorithms with powerful developer tools.
Many Robot applications such as automatic home / swimming pool cleaning robots, Security Cameras, Industrial Robots, Automatic publishing tools, Navigation systems, Routing planners, etc need code to be written for many repetitive tasks which are voluminous time consuming. ROS helps write such code more efficiently without errors and can be tested on various testing platforms.
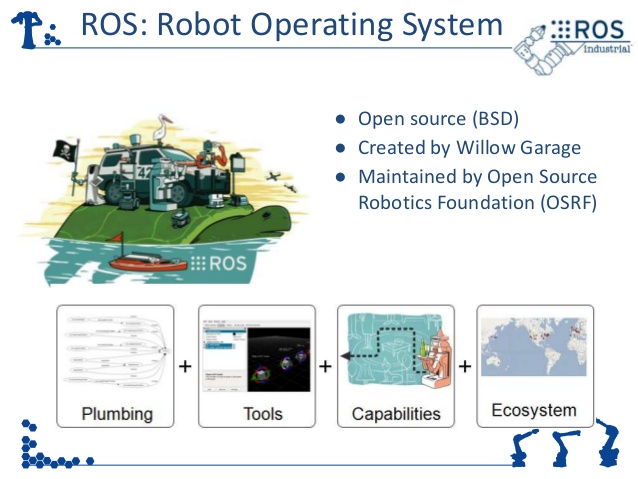
ROS Ecosystemcan be separated into three groups:
1. Language-and platform-independent tools used for building and distributing ROS-based software;
2. ROS client library implementations such as roscpp,rospy and roslisp
3. Packages containing application-related code which uses one or more ROS client libraries.
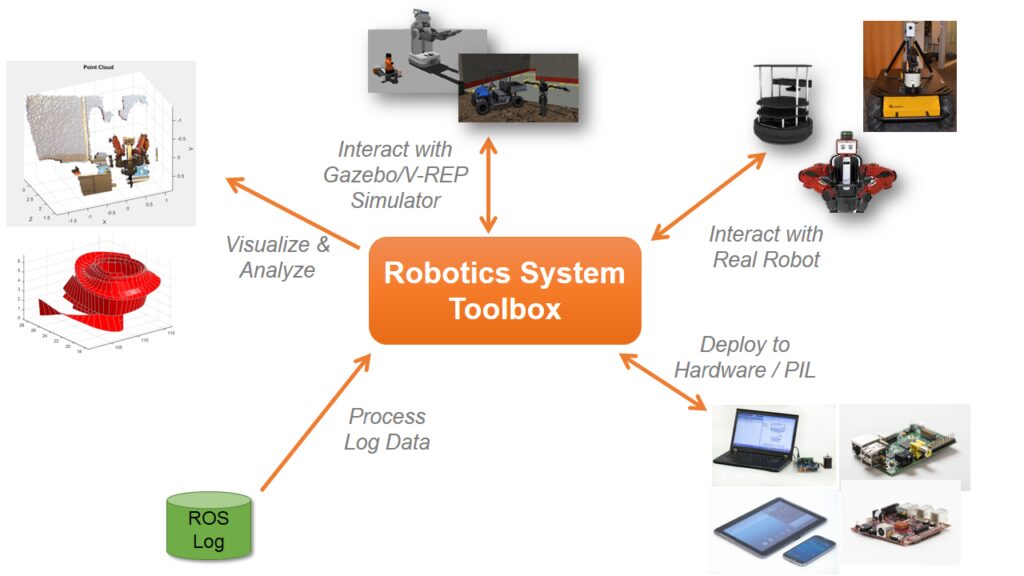
Language-independent tools and the main client libraries (C++, Python, LISP) are used for applications such as hardware drivers, robot models, datatypes, planning, perception, simultaneous localization and mapping, simulation tools, and other algorithms.
ROS client libraries (C++, Python, LISP) are geared toward a Unix-like system, primarily because of their dependence on large collections of open-source software dependencies.
ROS supports, Ubuntu Linux, Fedora Linux, Mac OS X, and Microsoft Windows 10, Android OS, MATLAB Toolbox, JAVA based applications, Java Script,
ROS Java can support Android OS, MATLAB toolbox. ROS LIBIS has also been developed which enables integration of software into a ROS system via any standards-compliant web browser.

Contact usIf you require any support for developing algorithms for Robots using ROS or troubleshooting existing algorithms call us and we will be happy to help you.